Drum rotation, rake pushing, screening, waste collection and reset actions.
Solutions
Industry Solutions
For smart litter boxes, smart cat toilets and smart feeders, we provide practical low-speed drive selection and custom motor support around real load, noise and structure requirements.
Smart Pet Drive
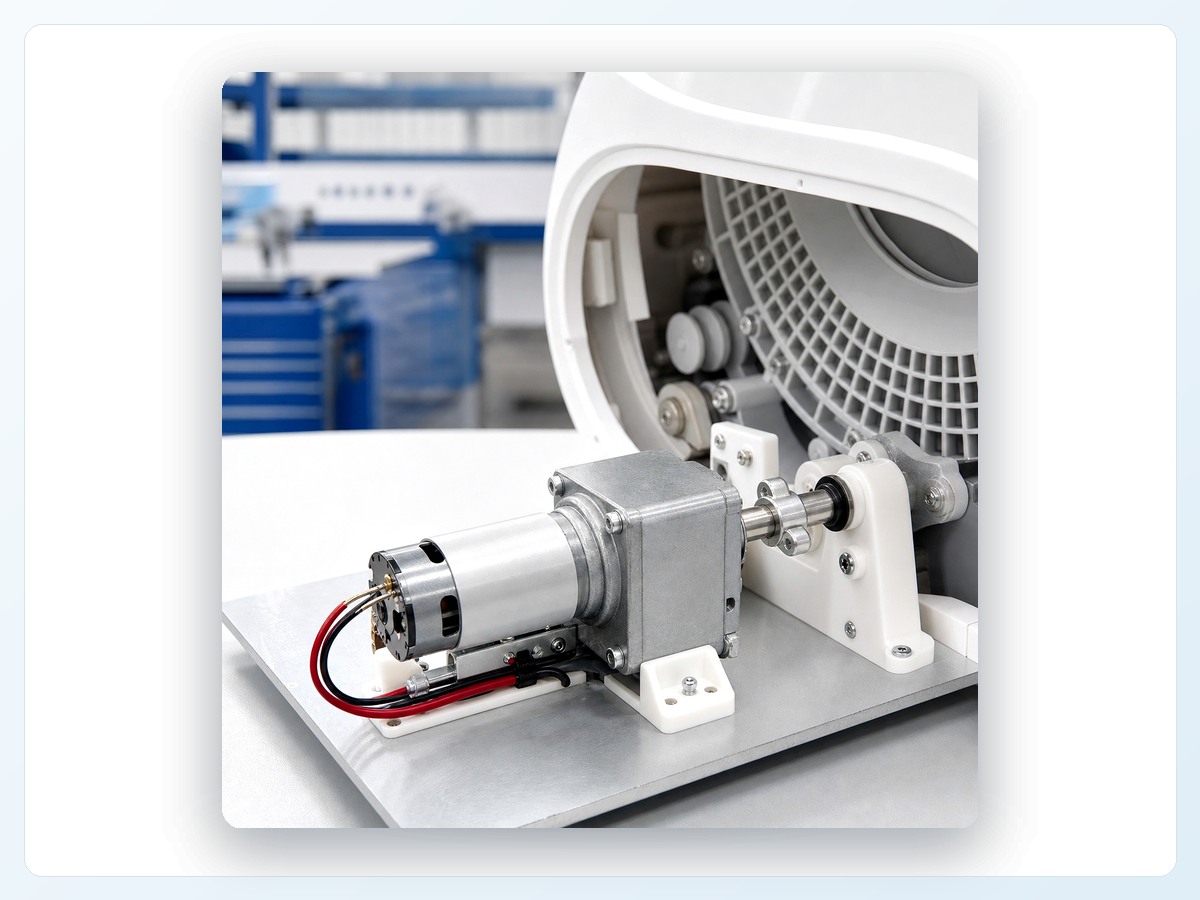
Validate the motor solution inside the full device structure.
For smart litter boxes and pet hardware projects, selection should start from mounting space, output shaft, drive mechanism, jam risk and noise target, not only no-load motor parameters.
- Match motor, gearbox, coupling and output shaft together
- Confirm torque margin for drum, screening and rake structures
- Test noise, temperature rise, lifetime and reset stability after installation

Low-noise cleaning, reset and waste handling mechanisms with anti-jam torque margin.
Metering wheels, auger feeding, anti-jam output and quiet household operation.
Opening structures, cleaning modules and compact low-speed transmission units.
Output shaft, terminal, wire length, feedback and self-locking options by project.
Support sample confirmation, parameter adjustment and mass-production introduction.
Application Match
Match motor solutions by application scenario
Different devices have different requirements for startup torque, running noise, feedback control and structure space.
ApplicationCommon actionKey requirementParameters to discuss
Smart litter boxDrum rotation, rake cleaning, screening resetLow noise, high torque, anti-jam, stable lifetimeLoad torque, noise target, structure drawing, terminal length
Smart cat toiletCleaning, waste handling, reset and stop-position controlQuiet running, reliable reset, jam protectionTorque margin, feedback signal, gearbox orientation
Smart feederMetering, auger feeding, anti-jam reverseCompact size, smooth running, low-voltage safetyFood type, target output, shaft shape, annual quantity
Smart pet deviceOpening, pushing, cleaning and compact actuationStable low-speed drive and custom structure fitMounting space, output shaft, cycle, wire terminal
Engineering Notes
Confirm these first during solution discussion
Confirm load before speed
Low-speed drive projects should verify normal load, maximum resistance, startup resistance and jam scenarios.
Low noise needs full-device validation
Motor body, gearbox, mounting structure, enclosure resonance and control strategy all affect final noise.
Feedback must match the controller
Hall, encoder and self-locking options should match control logic, reset method and protection strategy.
Wire terminals should be frozen early
Wire length, terminal, outlet direction and fixing method affect assembly efficiency and mass production.
Developing a new project?
Send the application structure, target speed, load torque and space drawing. We can quickly evaluate a suitable motor direction.
Submit Motor Requirements